
FDR - 드라이빙 다이내믹 컨트롤
Fahr Dynamik Regelung의 이니셜은 Bosch가 Mercedes와 협력하여 개발한 액티브 드라이빙 다이내믹 컨트롤 안전 시스템(지금은 ESP라고 함)입니다. 필요 시 자동으로 브레이크와 액셀러레이터를 간섭하여 차량의 궤적을 복원합니다.
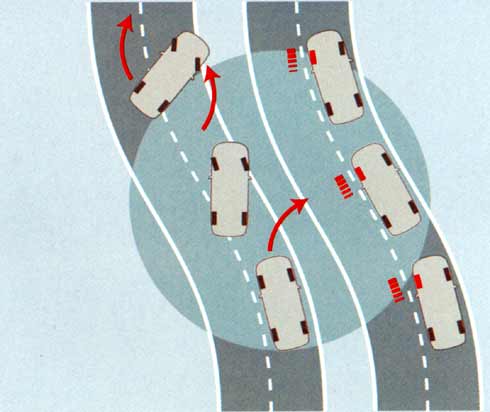
FDR은 미끄러짐과 미끄러짐, 즉 하나 이상의 바퀴가 접지력을 상실할 때 발생하는 언더스티어 또는 오버스티어 현상과 버클링으로 인해 미끄러지는 현상을 방지하는 데 사용됩니다. 동적 조정은 한 바퀴의 견인력 상실로 인한 미끄러짐을 효과적으로 교정하고 이에 따라 다른 세 바퀴의 토크를 변경할 수 있습니다. 예를 들어, 차량의 앞쪽 끝이 회전 바깥쪽으로 미끄러지는 경우(즉, 언더스티어), FDR은 안쪽 뒷바퀴를 제동하여 차량을 곧게 펴도록 개입합니다. 이 시스템은 차량의 무게 중심을 통해 수직축 주변의 미끄러짐을 감지할 수 있는 "센서"인 요 센서를 사용하여 차량 미끄러짐을 감지합니다.
이 외에도 FDR은 휠 속도, 측면 가속도, 스티어링 휠 회전, 마지막으로 브레이크 및 가속 페달에 가해지는 압력에 대해 알려주는 여러 센서를 사용합니다. (엔진 부하). 이 모든 데이터를 제어 장치에 저장하고 매우 짧은 시간에 수정 작업을 수행하기 위해 FDR에는 매우 많은 양의 처리 능력과 메모리가 필요합니다. 후자는 48킬로바이트로 ABS 시스템에 필요한 양의 XNUMX배, 미끄럼 방지 시스템에 필요한 양의 두 배입니다.
ESP도 참조하십시오.

